GPS機能が搭載されていると,自分の居場所が分かって便利だ。
特に沈み根などを発見したときは,マーク機能で印をつけておくと次回の釣行のときに同じポイントをすぐに攻めることができる。ナビ機能の醍醐味だ。
しかしながら,自分の位置を表示するときの「表示誤差」が大きいと,ピンポイントで攻めるのは難しい。
最近のカーナビだといろんなセンサーで補正するのでかなりの精度で表示されるが,GPSのみで表示していく「ちょいナビ」はどうだろうか。ナビの「クセ」を把握するため,ちょっと実験してみた。
ちなみにメーカーのホンデックスによると,「PS-501CNの測位・マーク等のGPS精度は上位モデルと同等」と書いてある。
実験方法
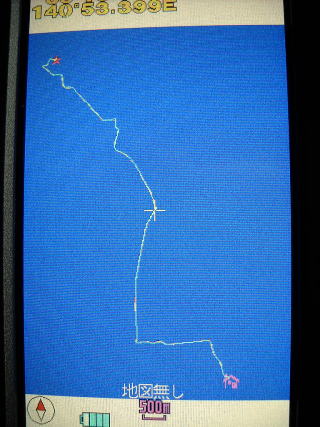
- まずは自宅にある車にPS-501CNを乗せて「出航地登録」する。写真の家マークだ。
- そして目的地までの道のりを,「航跡記録」で記録していく。
- 目的地に到着したら「航跡記録」をOFFにして自宅へ帰る。
- また自宅から「航跡記録」をONにして目的地へ行く。
この繰り返しだ。
測定時の主な条件
- 車の走行車線が変わると正確な検証ができないので,帰りは記録しない。
- 前日の走行車線が維持できない場合は実験を中止し,次の日に繰り越し。
- 魚探を車に乗せるときは,全て同じ場所・同じ向き。
- 測定日当日の天候なども覚えておく。
- 安全運転に支障がないようにする。
上記の条件で自宅から約16kmの走行を3回記録した結果について紹介する。
結論からいくと,私が想像していたよりも全体的な精度は良かった。
ただし,走行条件によっては誤差が大きかった。
まずは,誤差が非常に少なかった場所から紹介する。
黄矢印の部分に地図の縮尺がスケール表示されているが,この場所を3回走行した結果は,誤差が大きい場所でも約2m程度だった。
ちなみに,走行していた場所は「橋」だ。周りに障害物はほとんど無かった。
ちなみに,航跡の記録は3回とも色を変えて記録した。
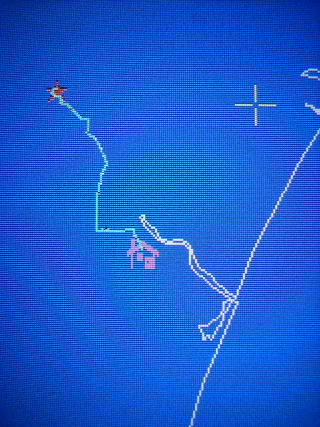
これは片側2車線の住宅地を走行したとき。高さのある建物は比較的少ない場所。
3回とも全く同じ車線を走行したのだが,この程度の誤差は多かった。
赤い線と青い線の誤差は,大きいところで10mちょっとだろうか。
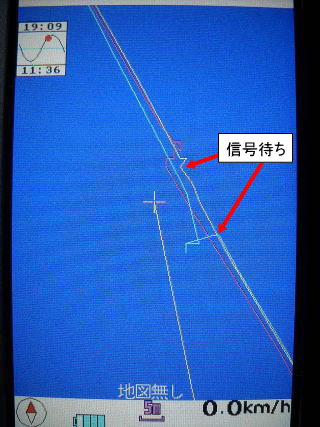
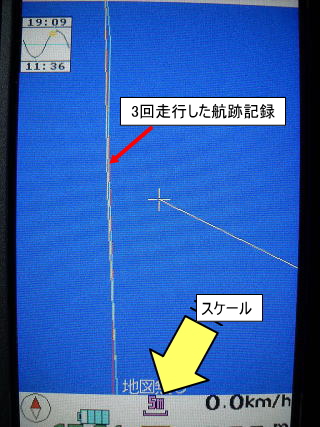
これも片側2車線の直線道路。画面下から上に向かって進行した。
最大誤差は5mくらいで記録が進んでいたのだが,信号待ちで変化が出た。
赤信号で車は完全に停止しているのに,しばらくすると航跡記録が動き出した。
完全な直線道路を直進したのだが,停止中に記録されるデータは方向もバラバラ。水色の線だと,下からきて左折したかのように記録されているが,私は直進しかしていない。
このときの誤差が,ここでは約10m位だ。
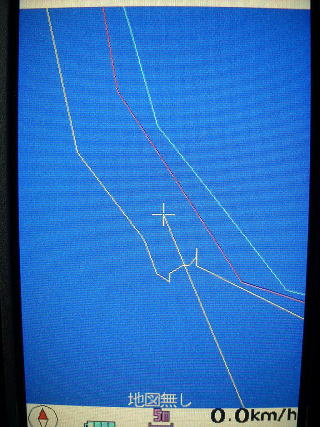
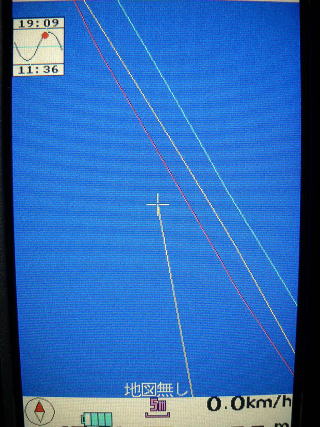
これは市街地の右カーブで,高層マンションなどに囲まれた場所。
黄色の線が乱れている部分は,車を停止させた時のもの。
最大誤差は20m超えているか。
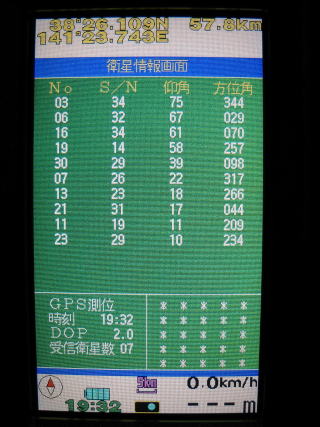
これはGPSの受信状態を示す画面。
この画面の見方については後日紹介するが,衛星からの受信状況は測位の精度に直接影響するため,本来なら受信状態を見ながら考えるのが正しいと思う。
しかし実際には車でもボートでも,走らせながら受信状況を確認するのは危険であるため難しい。ていうか,見てはダメだ。
結 論
今回の実験結果を基に実際にダムや海で使用する事を考えると,山に囲まれた場所などを除いて考えると,平均誤差は10m以内といった感じだと思う。
特に橋を走行した時の誤差は非常に精度が高かったので,障害物の少ない海では期待できる。
小さな沈み根などをマーキングして次回の釣行でピンポイントで辿り着けるかというと難しいかもしれないが,少し大きめの沈み根であれば,問題なく行けるのではないかと思う。